Robot hợp tác (collaborate robot)hay còn gọi là co-bot là loại robot được sử dụng nhằm mục đích có thể làm việc chung với con người.Điều này rất khác biệt so với các robot công nghiệp hiện nay là được thiết kế để làm việc độc lập và luôn có khung bảo vệ xung quanh robot, nhằm hạn chế gây thương tích cho con người.
Cobots có thể có nhiều vai trò – từ robot tự động có khả năng làm việc cùng với con người trong một môi trường đến những nhiệm vụ làm việc độc lập. Robot công nghiệp cộng tác là những cỗ máy rất phức tạp có khả năng phối hợp tay với con người một cách hiệu quả, giúp giảm thiểu những nhiệm vụ khó khăn hoặc lặp đi lặp lại của con người.
Cobots được phát minh vào năm 1996 bởi J. Edward Colgate và Michael Peshkin, giáo sư tại Đại học Northwestern. Bản đệ trình bằng sáng chế Hoa Kỳ năm 1997 mô tả cobots là
“an apparatus and method for direct physical interaction between a person and a general purpose manipulator controlled by a computer.
Công ty tiên phong về robot công nghiệp dựa trên nền tảng KUKA của Đức phát hành năm 2004 là Lbot đầu tiên 3. Robot cộng tác này là kết quả của sự cộng tác lâu dài với Viện Trung tâm vũ trụ Đức kể từ năm 1995. KUKA đã cải tiến công nghệ cobotics trên KUKA LBR 4 (2008) thành KUKA LBR iiwa (2013)
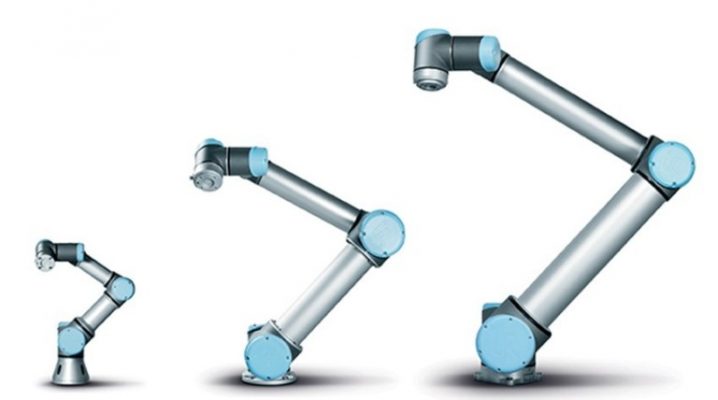
Universal Robot đã phát hành cobot đầu tiên, UR5, vào năm 2008. Vào năm 2012, cobo UR10 đã được phát hành, và sau đó là một bảng cobot, UR3, vào năm 2015.
Rethink Robotics đã phát hành một cobot công nghiệp, Baxter, vào năm 2012 và robot Sawyer hợp tác nhỏ hơn, nhanh hơn vào năm 2015, được thiết kế cho cao nhiệm vụ chính xác.
Không tìm thấy sản phẩm nào khớp với lựa chọn của bạn.
